Robotic Polishing System Evaluation Guide
How to Evaluate a Robotic Polishing System: 10 Practical Questions Before You Invest
Automating grinding, polishing, sanding, or deburring is not as simple as installing a robot beside a workbench. In many factories, the finishing process is still one of the most difficult steps to automate because every part is slightly different, every abrasive tool changes during use, and surface quality is often judged by both measurable standards and visual appearance.

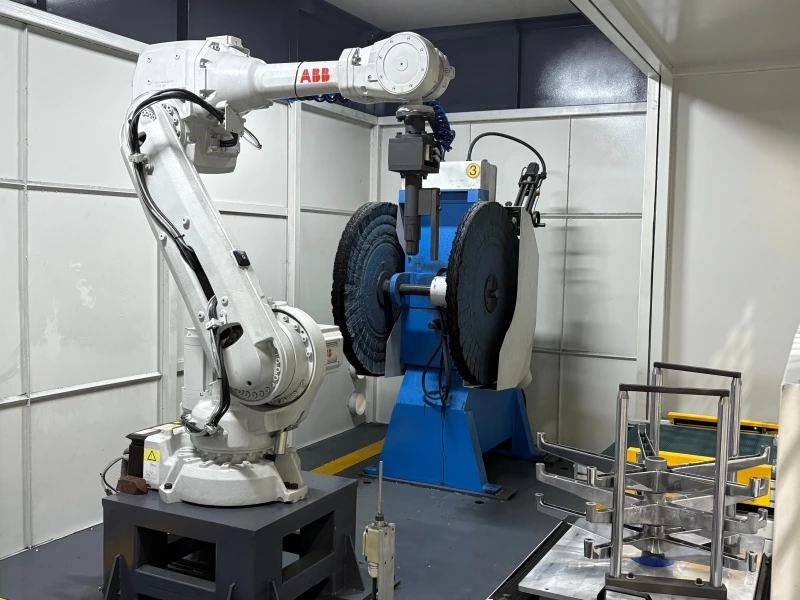
A complete robotic polishing system includes the robot, tooling, fixture, dust collection, and process control.
That is why choosing a robotic polishing system should not begin with the robot brand alone. A reliable system depends on the full process: the robot, force control, polishing tools, fixtures, dust collection, offline programming, safety protection, and the supplier’s ability to adjust the process after real production begins.
Before investing in a robotic grinding or polishing cell, manufacturers should ask the following ten practical questions.
1. Can the System Control Contact Force Consistently?
In robotic polishing, force control is one of the most important factors affecting surface quality. If the contact force is too high, the part may be over-polished, deformed, burned, or scratched. If the force is too low, burrs, weld marks, casting lines, or rough areas may remain.
A good robotic polishing system should be able to maintain stable contact between the abrasive tool and the workpiece, even when there are small variations in the part surface. This is especially important for curved parts, castings, sanitary hardware, automotive components, and irregular metal parts.
Stable Contact Force / Consistent Surface Quality
When evaluating a supplier, ask:
Can the robot adjust pressure during polishing?
Is the force control based on sensors, software, pneumatic floating, or a combination of methods?
Can the supplier show polishing results on real customer parts, not only standard demo samples?
For many manufacturers, the goal is not just to make the robot move. The goal is to make the robot polish like an experienced worker, but with better repeatability.
2. Can the System Handle Real Workpiece Variations?
In real production, parts are rarely perfect. Castings may have shrinkage, welding parts may have deformation, and manually loaded parts may have small positioning errors. If the robotic system only follows a fixed path without compensation, it may miss some areas or remove too much material from others.
This is why fixture design, positioning detection, and process tolerance are critical.
Before purchasing a robotic polishing machine, ask whether the supplier can test several parts from different production batches. Do not only provide the best sample. A serious supplier should be willing to evaluate the actual variation range of your parts and explain how the system will handle it.
Important points include:
How is the workpiece positioned?
Does the fixture repeat accurately?
Is vision, laser detection, or mechanical positioning required?
What happens if the part exceeds the normal tolerance range?
A good robotic polishing project starts with understanding the real condition of the customer’s parts.
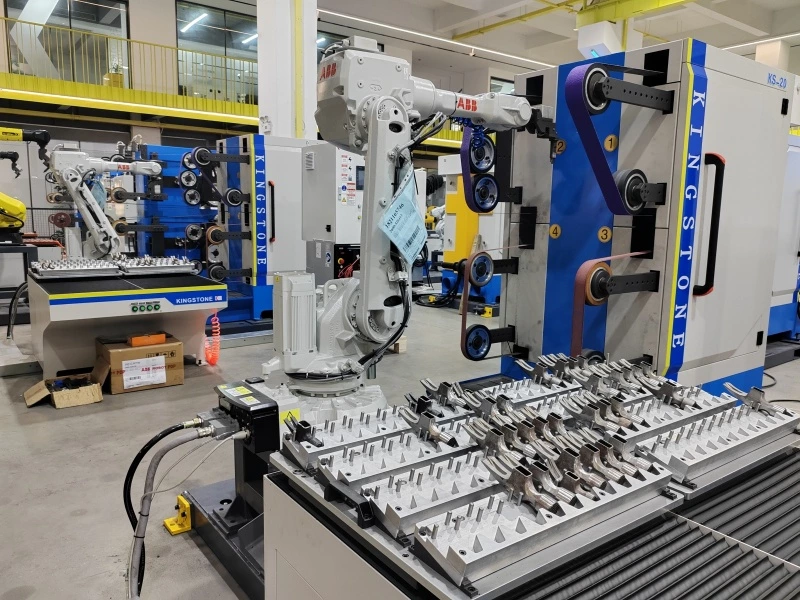
Different parts require different fixtures, tools, and polishing paths
3. Can the Polishing Path Be Generated Efficiently?
For simple flat parts, path programming may be relatively easy. But for complex curved parts, deep cavities, edges, corners, and irregular surfaces, manual teaching can become slow and inconsistent.
A strong robotic polishing supplier should understand both robot programming and surface finishing processes. The polishing path must consider tool angle, contact area, abrasive direction, edge protection, overlap, cycle time, and collision avoidance.
When discussing a project, ask:
How will the polishing path be created?
Can the supplier work from 3D drawings or samples?
How long does it take to program a new part?
Can the program be adjusted when the part design changes?
The best solution is not always the most complicated one. For some parts, a stable fixture and optimized manual teaching may be enough. For more complex parts, offline programming, simulation, or scanning may be needed. The key is whether the supplier can choose the right method for the actual production requirement.
4. How Does the System Deal with Abrasive Tool Wear?
Abrasive belts, wheels, brushes, and grinding heads do not perform the same from the first part to the last part. As the tool wears, the cutting ability changes. This can affect surface roughness, polishing time, material removal, and final appearance.
If the system does not consider tool wear, the first batch of parts may look good, while later parts become inconsistent.

Abrasive Tool Wear Matters / Stable Results Need Process Compensation
A practical robotic polishing system should include a tool wear strategy. This may involve scheduled tool replacement, parameter adjustment, tool position compensation, or process inspection after a certain number of parts.
Ask the supplier:
How often should the abrasive tool be replaced?
Can the machine compensate for tool wear?
Is the compensation based on time, part quantity, force feedback, or actual testing?
How does the operator know when to change the tool?
For high-volume production, abrasive management can have a major effect on quality stability and operating cost.
5. Is the Dust Collection and Safety Design Suitable for Polishing?
Grinding and polishing generate dust, sparks, noise, and sometimes combustible particles. This is especially important when processing aluminum, magnesium, titanium, stainless steel, or other metal parts.

Water Dust collection and safety design are essential for robotic grinding and polishing
A robotic polishing cell should not only focus on polishing quality. It must also protect operators, equipment, and the workshop environment.
Important safety questions include:
Is there a dust collection system close to the polishing area?
Is the cell enclosed or semi-enclosed?
How are sparks, dust, and noise controlled?
Are the electrical and pneumatic components suitable for the working environment?
For some materials and applications, additional explosion-proof or fire-prevention measures may be required. The exact design depends on the material, abrasive tool, dust volume, and local safety regulations.
A reliable supplier should be able to discuss these points clearly instead of treating dust collection as an optional accessory.
6. Can the System Achieve the Required Surface Finish?
Different customers define “good polishing” in different ways. Some need burr removal. Some need satin finishing. Some need mirror polishing. Others need controlled roughness before coating, plating, or painting.
Before automation, the required finish should be clearly defined.

Send Us Your Parts for Evaluation
Useful information includes:
Target surface roughness, such as Ra value
Visual finish requirement
Allowed polishing marks or direction
Areas that must not be polished
Required cycle time
Inspection method after polishing
If possible, customers should send sample parts and quality standards before the quotation stage. A professional supplier can then recommend the right abrasive process, robot configuration, fixture, polishing tool, and inspection method.
Robotic polishing is not only a machine purchase. It is a process development project.
7. Can the Supplier Integrate Loading, Unloading, and Multiple Processes?
Many factories start by asking for one robot to replace one manual worker. But in real production, polishing may involve several steps: rough grinding, fine grinding, brushing, buffing, cleaning, inspection, and unloading.
If these steps are not planned together, the robot may finish one operation quickly but wait for the next step. This reduces the actual efficiency of the line.
For production automation, ask:
Will the system be a single robotic cell or a complete production line?
How will parts be loaded and unloaded?
Can different polishing tools be integrated in one station?
Is automatic tool change required?
How will the system connect with existing conveyors, fixtures, or inspection equipment?
A good supplier should consider cycle time balance, operator workflow, maintenance access, and future expansion.
8. Is the System Easy for Operators to Use and Maintain?
Even the best robotic polishing machine must be operated by real factory staff. If the system is too difficult to adjust, production may depend too much on the supplier’s engineer.
The user interface should be clear. Operators should know how to start production, change programs, replace abrasive tools, respond to alarms, and perform daily maintenance.
Ask the supplier:
What training is included?
Can operators adjust basic process parameters?
Are alarms easy to understand?
Is there a maintenance checklist?
Can the supplier provide remote support?
A successful automation project should reduce dependence on manual polishing skills, not create a new problem where only one expert can run the machine.
9. Does the Supplier Have Real Application Experience?
Polishing looks simple in videos, but real projects often involve many details: fixture adjustment, abrasive selection, dust control, programming, part tolerance, surface defects, and customer inspection standards.
That is why real application experience matters.
When evaluating a robotic polishing supplier, ask for examples related to your industry or part type. For example:
Automotive parts grinding and deburring
Aerospace blade finishing
Medical component polishing
Die-cast aluminum part deburring
Stainless steel or brass surface finishing
You do not always need an identical case. But the supplier should understand similar materials, shapes, and quality requirements.
If possible, request a sample test. A sample test can reveal much more than a brochure.
10. What Support Is Available After Installation?
Robotic polishing projects often need adjustment after installation. The real production environment may be different from the test environment. Operators may load parts differently. Abrasive suppliers may change. Part batches may vary. Quality requirements may also become stricter over time.
That is why after-sales support and process optimization are important.
Before placing an order, confirm:
Who will support installation and commissioning?
How long is the training period?
Can the supplier help optimize the process after trial production?
Are spare parts and consumables easy to obtain?
Is remote troubleshooting available?
The best supplier is not only a machine seller. It should be a long-term automation partner that helps the customer improve production stability.
Conclusion: Evaluate the Complete Process, Not Just the Robot
A robotic polishing system is a combination of robot motion, force control, tooling, fixtures, abrasives, safety design, programming, and production experience. The robot arm is only one part of the solution.
Before investing, manufacturers should evaluate whether the supplier understands the real polishing process behind the machine. Can they test your parts? Can they explain the abrasive strategy? Can they design the fixture properly? Can they control dust and safety risks? Can they support production after installation?
For manufacturers facing labor shortages, inconsistent manual polishing quality, high rework rates, or strict surface finishing requirements, robotic polishing can be a powerful solution. But the key is choosing a system designed around real parts, real production conditions, and real quality standards.
At Kingstone Robotics, we focus on customized robotic grinding, polishing, sanding, and deburring solutions for different industries and workpiece requirements. If you are considering automation for your surface finishing process, send us your part drawings, photos, or samples. Our engineering team can help evaluate the process and recommend a suitable robotic polishing solution.